Now that I have instruments mounted and feeding sailing data to the cockpit, what if I wanted to access that data from multiple areas of the boat? Maybe even have GPS data sent from an iPhone or iPad to an Autopilot? Maybe speed and wind info sent to a chart plotter? And what if I wanted all this to be done…WIRELESSLY? Well the cool thing about the TackTick/Raymarine wireless instruments that are on the boat is that the system came with a NMEA module that will take all the data from the instruments, wind, depth, speed, temperature and send that to other instruments. I added a NMEA to Wifi module and now all that data is sent to wirelessly to an iPhone, iPad or Computer. It also receives data from those devices like GPS coordinates, or waypoints and compass information. How does this work? Lets talk about it!!!
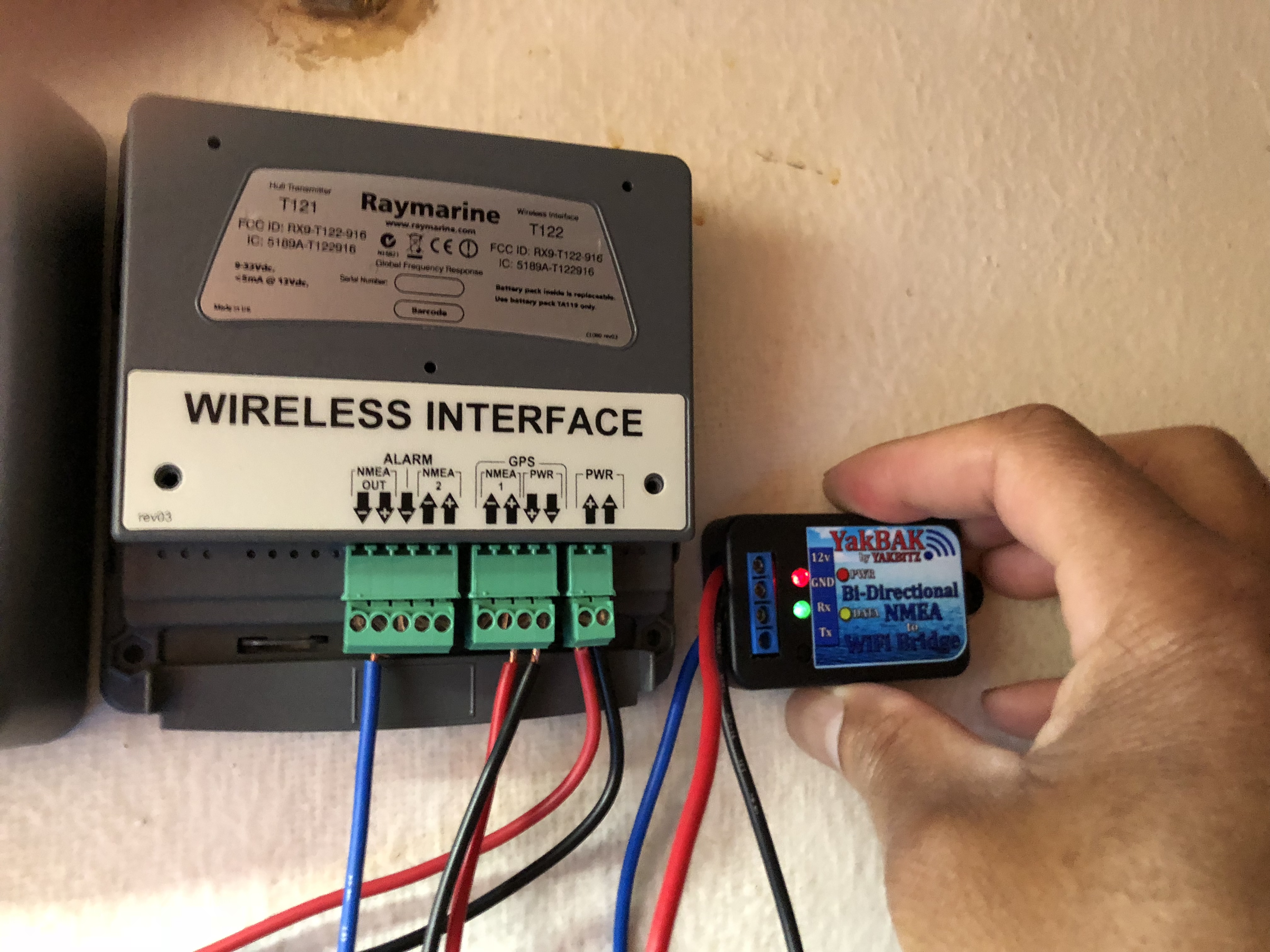
I bought a NMEA to WiFi module called the YakBAK. There are many out there but they vary in price and number of wireless devices simultaneously connected. I wanted a number of devices connected so I got the YakBAK. It’s made buy a guy in Australia and it’s the most affordable one I have seen. It cost $60. There are units that cost $600 and only allow one device to connect wirelessly at a time. This one allows 4 devices at a time. Once powered up it creates a WiFi network and you can connect to that network. Any device connected to the network and running NMEA software will access the data stream. So connect the NMEA out of the Raymarine system to the NMEA in on the YakBAK and then NMEA out of the YakBAK to the NMEA in on the Raymarine system. Setup the WiFi and create a password and then you are all set. Once you connect to the network with any WiFi device you can run NMEA software and see all the data on the network. Here is the system running on an iPad using the app NMEAremote to monitor wind, boat speed and depth data.
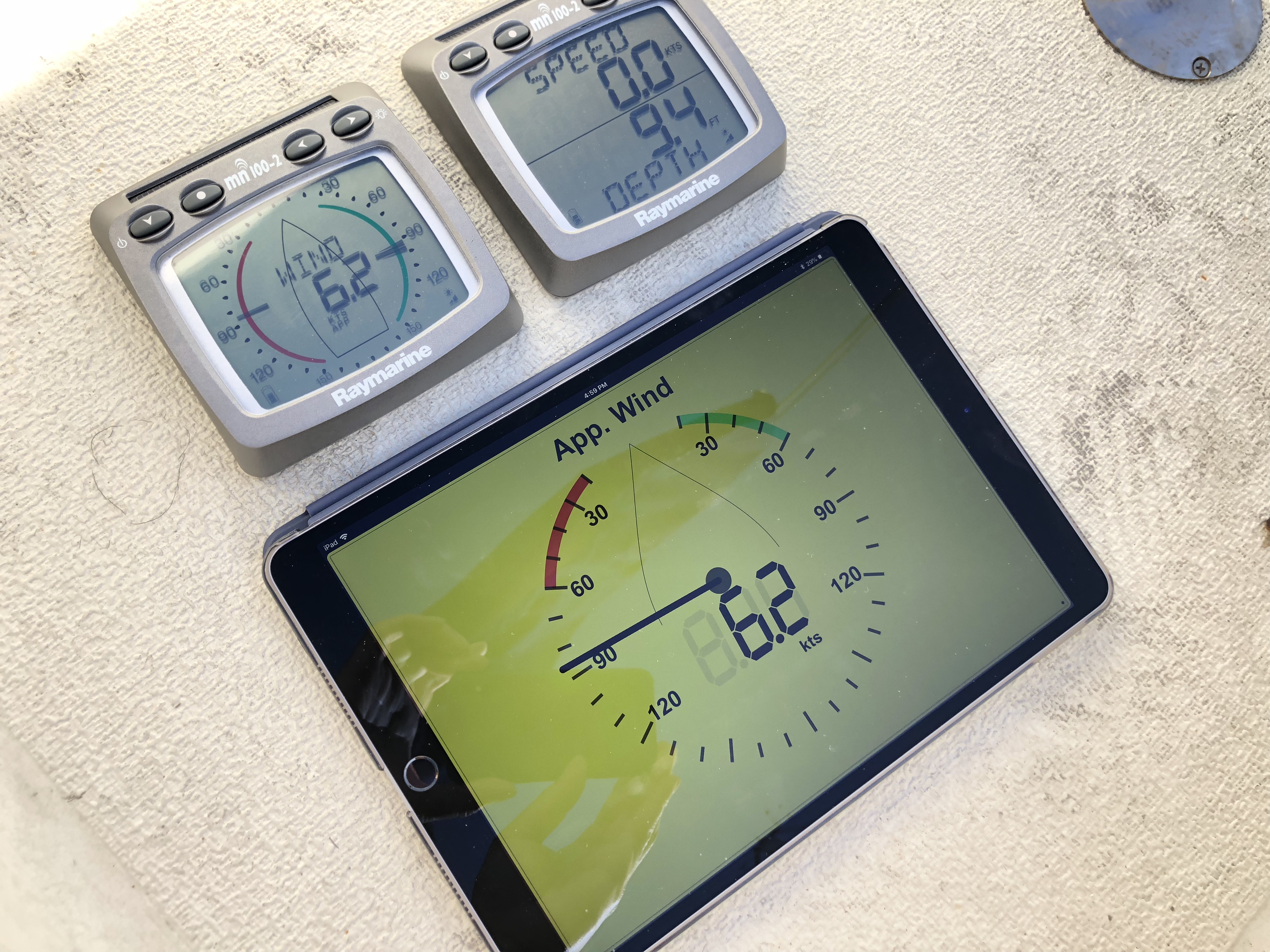
This can also take info from the iPad and send it back into the system. Let’s say I get an Autopilot, it can interface with the iPad running Navigation software. Pretty slick.
So let’s take it one step further. Currently the network isn’t aware of its GPS or compass heading and thus can not calculate its SOG (Speed over Ground) or know the COG (Course over Ground). This is all GPS related information and Cuajota doesn’t have GPS, but iPhones have had GPS since the iPhone 3G. I have an old iPhone 6 that’s collecting dust in a drawer. I downloaded an app called GPS2IP and its job is to take all the GPS related data and broadcast it into the network data stream.
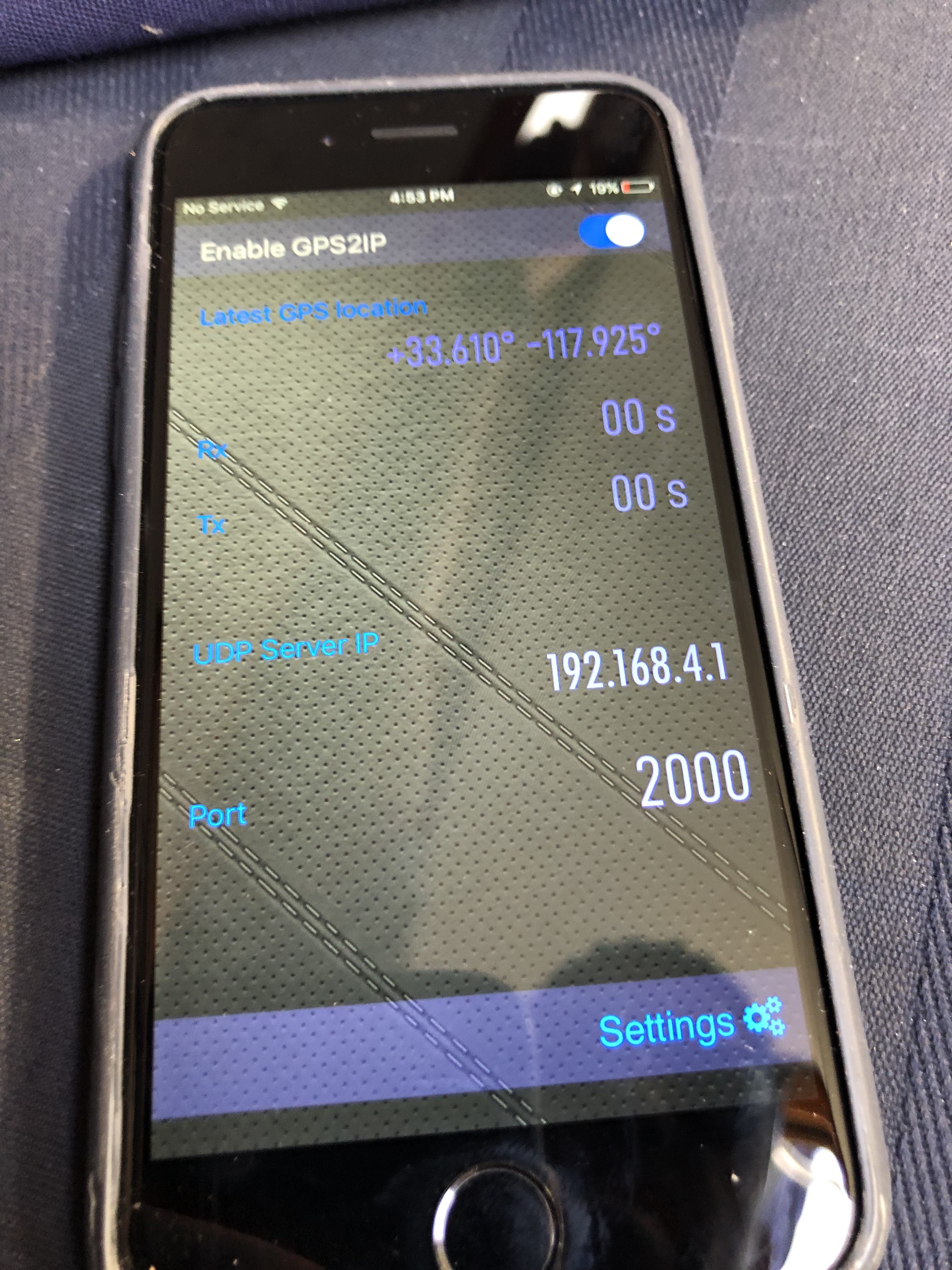
Once this was done, not only was the boat’s information on the network, wind, depth and boat speed, but GPS info was now also on the network and could be displayed on any display connected to the network whether it’s the Raymarine boat displays or an iPad or iPhone that’s on the network running NMEA software.



